En física e ingeniería, el término elasticidad designa la propiedad mecánica de ciertos materiales de sufrir deformaciones reversibles cuando se encuentran sujetos a la acción de fuerzas exteriores y de recuperar la forma original si estas fuerzas exteriores se eliminan.
Fundamentación teórica
La elasticidad es estudiada por la teoría de la elasticidad, que a su vez es parte de la mecánica de sólidos deformables. La teoría de la elasticidad (TE) como la mecánica de sólidos (MS) deformables describe cómo un sólido (o fluido totalmente confinado) se mueve y deforma como respuesta a fuerzas exteriores. La diferencia entre la TE y la MS es que la primera sólo trata sólidos en que las deformaciones son termodinámicamente reversibles.
La propiedad elástica de los materiales está relacionada, como se ha mencionado, con la capacidad de un sólido de sufrir transformaciones termodinámicas reversibles. Cuando sobre un sólido deformable actúan fuerzas exteriores y éste se deforma se produce un trabajo de estas fuerzas que se almacena en el cuerpo en forma de energía potencial elástica y por tanto se producirá un aumento de la energía interna. El sólido se comportará elásticamente si este incremento de energía puede realizarse de forma reversible, en este caso decimos que el sólido es elástico.
Teoría de la Elasticidad Lineal
Un caso particular de sólido elástico se presenta cuando las tensiones y las deformaciones están relacionadas linealmente, mediante la siguiente ecuación constitutiva:
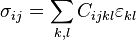
Cuando eso sucede decimos que tenemos un sólido elástico lineal. La teoría de la elasticidad lineal es el estudio de sólidos elásticos lineales sometidos a pequeñas deformaciones de tal manera que además los desplazamientos y deformaciones sean "lineales" (es decir, que las componentes del campo de desplazamientos u sean muy aproximadamente una combinación lineal de las componentes del tensor deformación del sólido. En general un sólido elástico lineal sometido a grandes desplazamientos no cumplirá esta condición. Por tanto la teoría de la elasticidad lineal sólo es aplicable a:
- Sólidos elásticos lineales, en los que tensiones y deformaciones estén relacionadas linealmente (linealidad material).
- Deformaciones pequeñas, en ese caso puede deformaciones y desplazamientos estén relacionados linealmente. En ese caso puede usarse el tensor deformación lineal de Green-Lagrange para representar el estado de deformación de un sólido (linealidad geométrica).
Debido a los pequeños desplazamientos y deformaciones a los que son sometidos los cuerpos, se usan las siguientes simplificaciones y aproximaciones para sistemas estables:
- Las tensiones se relacionan con las superficies no deformadas
- Las condiciones de equilibrio se presentan para el sistema no deformado
Para determinar la estabilidad de un sistema hay presentar las condiciones de equilibrio para el sistema deformado.
Tensión
La tensión en un punto se define como el límite de la fuerza aplicada sobre una pequeña región sobre un plano π que contenga al punto dividida del área de la región, es decir, la tensión es la fuerza aplicada por unidad de superficie y depende del punto elegido, del estado tensional de sólido y de la orientación del plano escogido para calcular el límite. Puede probarse que la normal al plano escogido nπ y la tensión tπ en un punto están relacionadas por:

Donde T es el llamado tensor tensión, también llamado tensor de tensiones, que fijada una base vectorial ortogonal viene representado por una matriz simétrica 3x3:

Donde la primera matriz es la forma común de escribir el tensor tensión en física y la segunda forma usa las convenciones comunes en ingeniería. Dada una región en forma de ortoedro con caras paralelas a los ejes coordenados situado en el interior un sólido elástico tensionado las componentes σxx, σyy y σzz dan cuenta de cambios de longitud en las tres direcciones, pero que no distorsinan los ángulos del ortoedro, mientras que las componentes σxy, σyz y σzx están relacionadas con la distorsión angular que convertiría el ortoedro en un paralelepípedo.
Deformación
En teoría lineal de la elasticidad dada la pequeñez de las deformaciones es una condición necesaria para poder asegurar que existe una relación lineal entre los desplazamientos y la deformación. Bajo esas condiciones la deformación puede representarse adecuadamente mediante el tensor deformación infinitesimal que viene dada por:

Los componentes de la diagonal principal contienen los alargamientos (dilataciones), mientras que el resto de los componentes del tensor son los medios desplazamientos. Las componentes están linealmente relacionadas con los desplazmientos mediante esta relación:

Ecuaciones constitutivas de Lamé-Hooke
Las ecuaciones de Lamé-Hooke son las ecuaciones constitutivas de un sólido elástico lineal, homogéneo e isótropo, tienen la forma:
-
En el caso de un problema unidimensional, σ = σ11, ε = ε11, C11 = E y la ecuación anterior se reduce a:

Donde E es el módulo de elasticidad longitudinal o módulo de Young y G el módulo de elasticidad transversal. Para caracterizar el comportamiento de un sólido elástico lineal e isótropo se requieren además del módulo de Young otra constante elástica, llamada coeficiente de Poisson (ν) y el coeficiente de temperatura (α). Por otro lado, las ecuaciones de Lamé para un sólido elástico lineal e isótropo pueden ser deducidas del teorema de Rivlin-Ericksen, que pueden escribirse en la forma:



Ciertos materiales muestran un comportamiento sólo aproximadamente elástico, mostrando por ejemplo variación de la deformación con el tiempo o fluencia lenta. Estas deformaciones pueden ser permanentes o tras descargar el cuerpo pueden desaparecer (parcial o completamente) con el tiempo (viscoplasticidad, viscoelasticidad). Además algunos materiales pueden presentar plasticidad es decir pueden llegar a exhibir pqueñas deformaciones permanentes, por lo que las ecuaciones anteriores en muchos casos tampoco constituyen una buena aproximación al comportamiento de estos materiales.